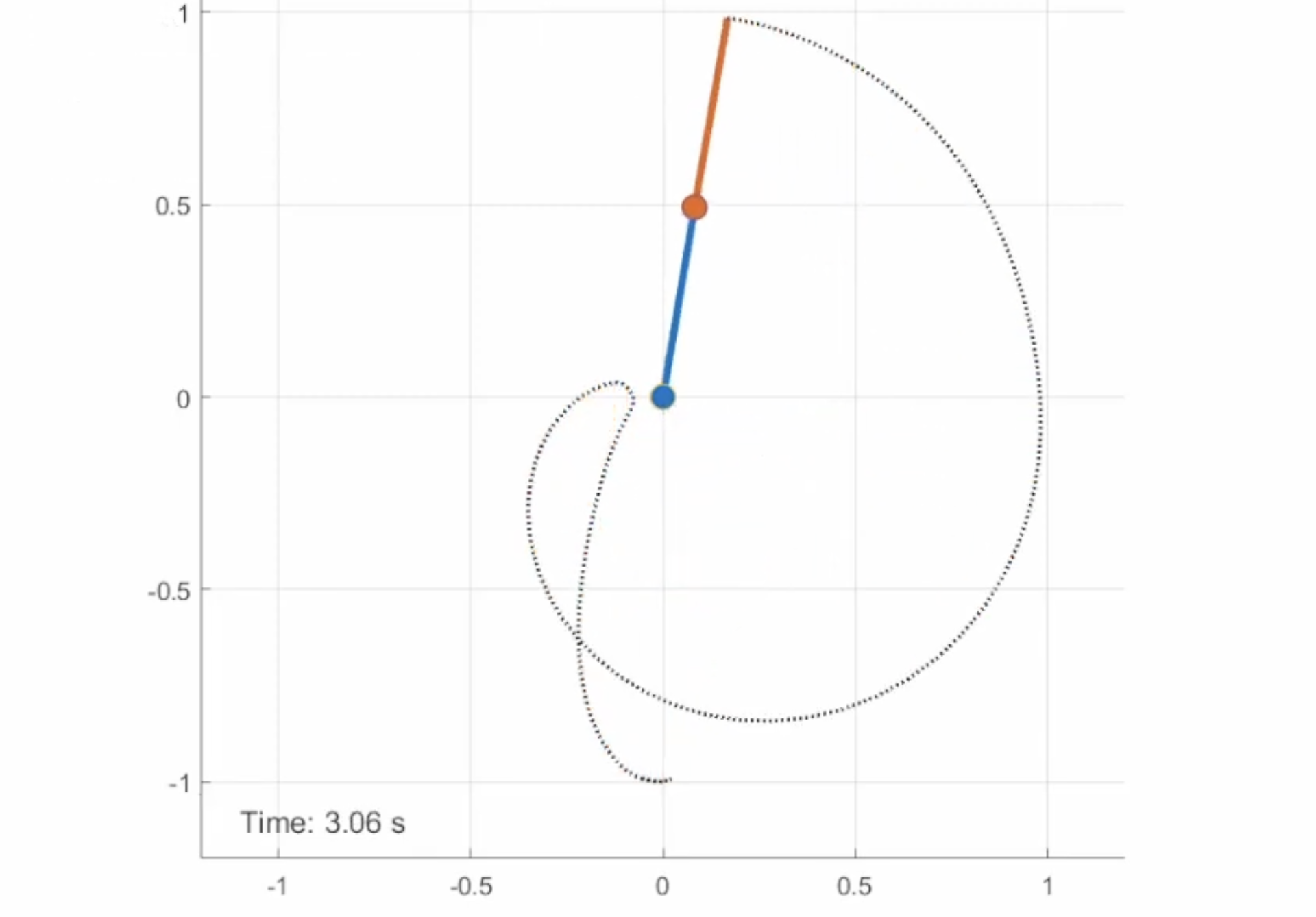
Nonlinear geometric control of partially-coupled underactuated floating vehicles
Advanced Methods in Control UAVs Geometric Tracking Controller Lyapunov Stability
University 'La Sapienza' of Rome
This work presents a rigorous analysis of an existing geometric control law specifically developed for generically tilted multirotor (GTM) platforms, as originally proposed by Michieletto et al. [1,2] for vehicles wit...
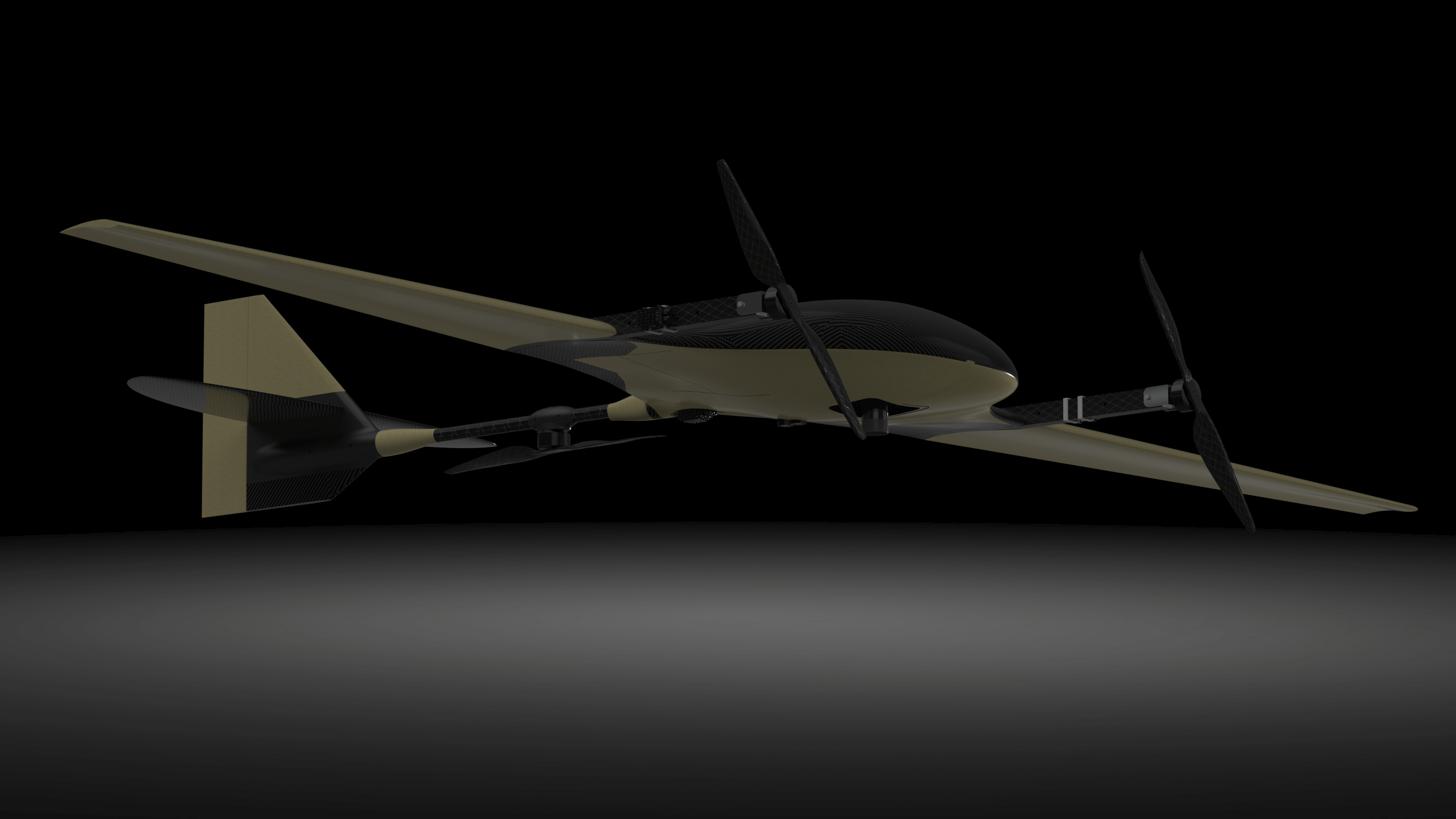
Design and build of a tilt-tricopter VTOL UAV for SUAS Competition 2025
Aerial Robotics VTOL Geometric Control MATLAB Simulink
Sapienza Flight Team
Sapienza Flight Team launched the Stingray VTOL program to compete in SUAS 2025 with a novel tilt-tricopter platform capable of hovering like a multirotor and cruising like a fixed-wing aircraft. I lead the design of ...
Control of underactuated robots via input-constrained receding-horizon differential dynamic programming
Control Problems in Robotics Differential Dynamic Programming Optimization Control
University 'La Sapienza' of Rome
We push Differential Dynamic Programming beyond textbook form to tame under-actuated robots—machines with more freedom than motors. By fusing DDP with Levenberg-Marquardt regularisation, line-search safeguarding, hard...
Control of a video-game race car using a convolutional neural network
Machine Learning Python (Keras) CNN
University 'La Sapienza' of Rome
In this project we tackle CarRacing-v0, OpenAI Gym’s 2-D racetrack, treating each rendered frame as an image-classification task. By converting raw pixels into steering and throttle commands, we train an agent that ma...
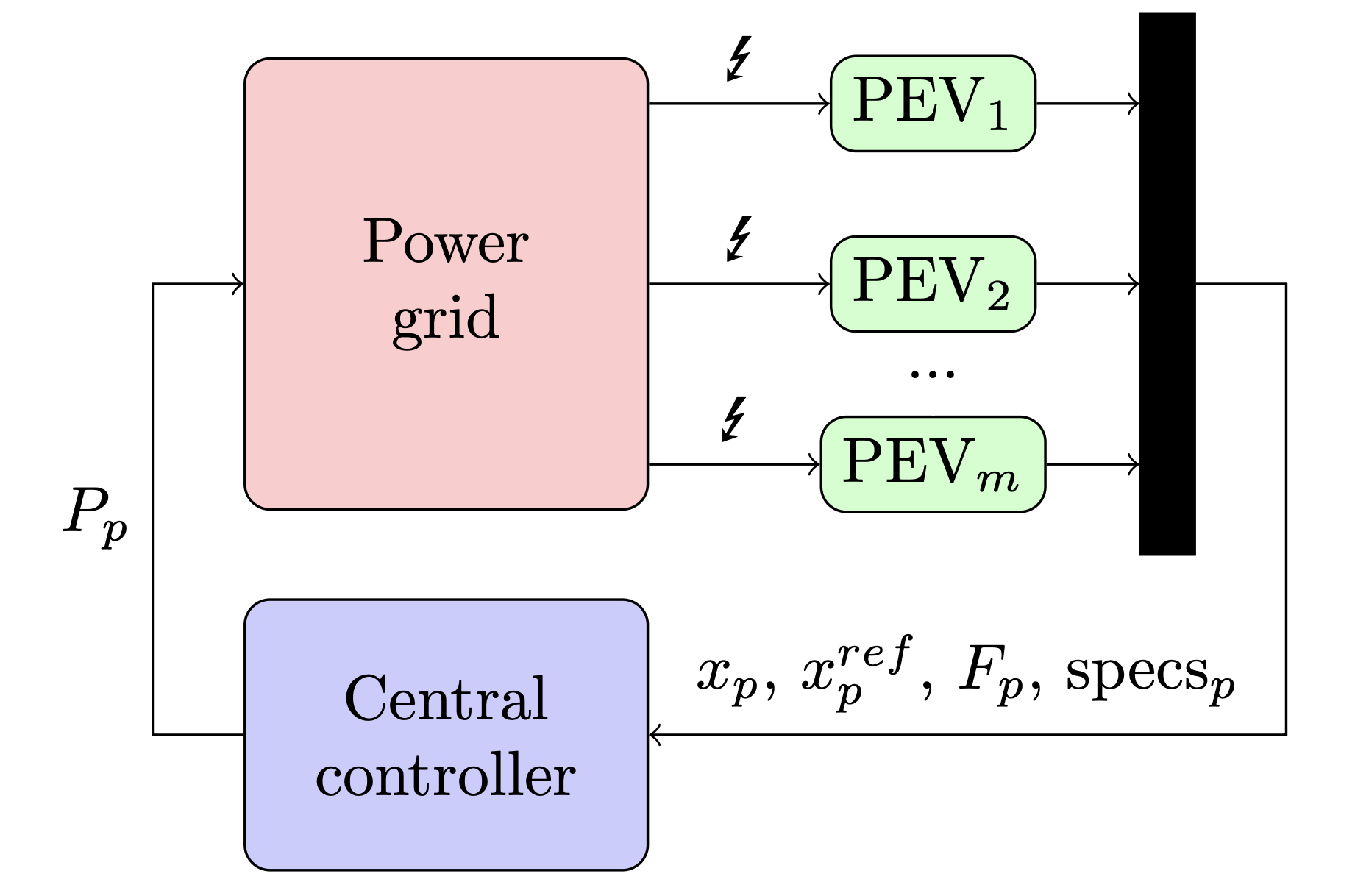
Decentralized control of the charging process of a fleet of electric vehicles
MPC Energy System Decentralized Control
University 'La Sapienza' of Rome
Implemented classical and decentralized MPC to schedule optimal charging of a large fleet of plug-in electric vehicles.
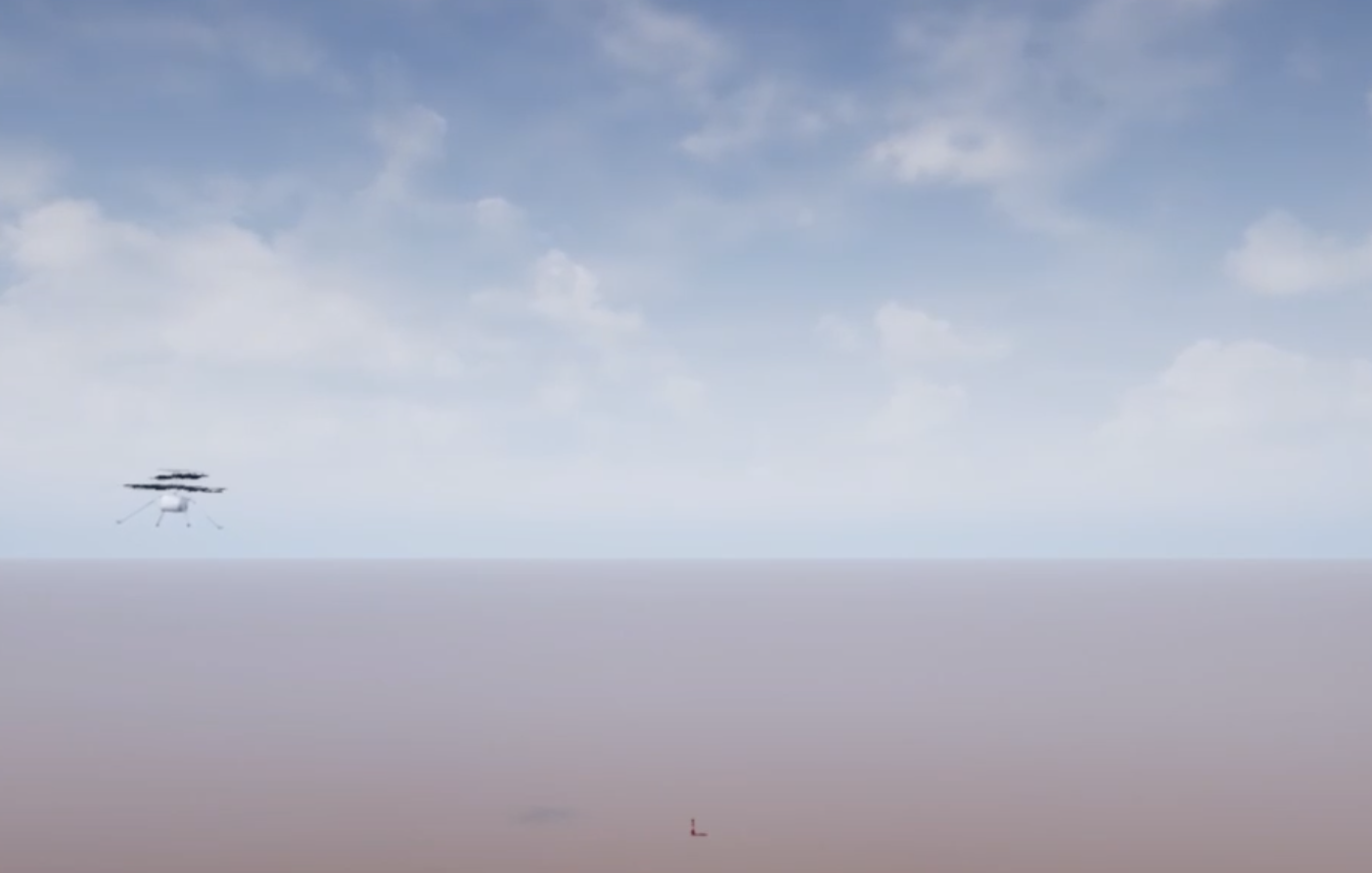
Ingenuity
Control Problems in Robotics UAVs Model Based
University 'La Sapienza' of Rome
Teaming up with three fellow engineers, I spearheaded the creation of a high-fidelity Simulink digital twin of NASA’s historic Ingenuity helicopter—the first aircraft ever to achieve powered flight on another planet (...
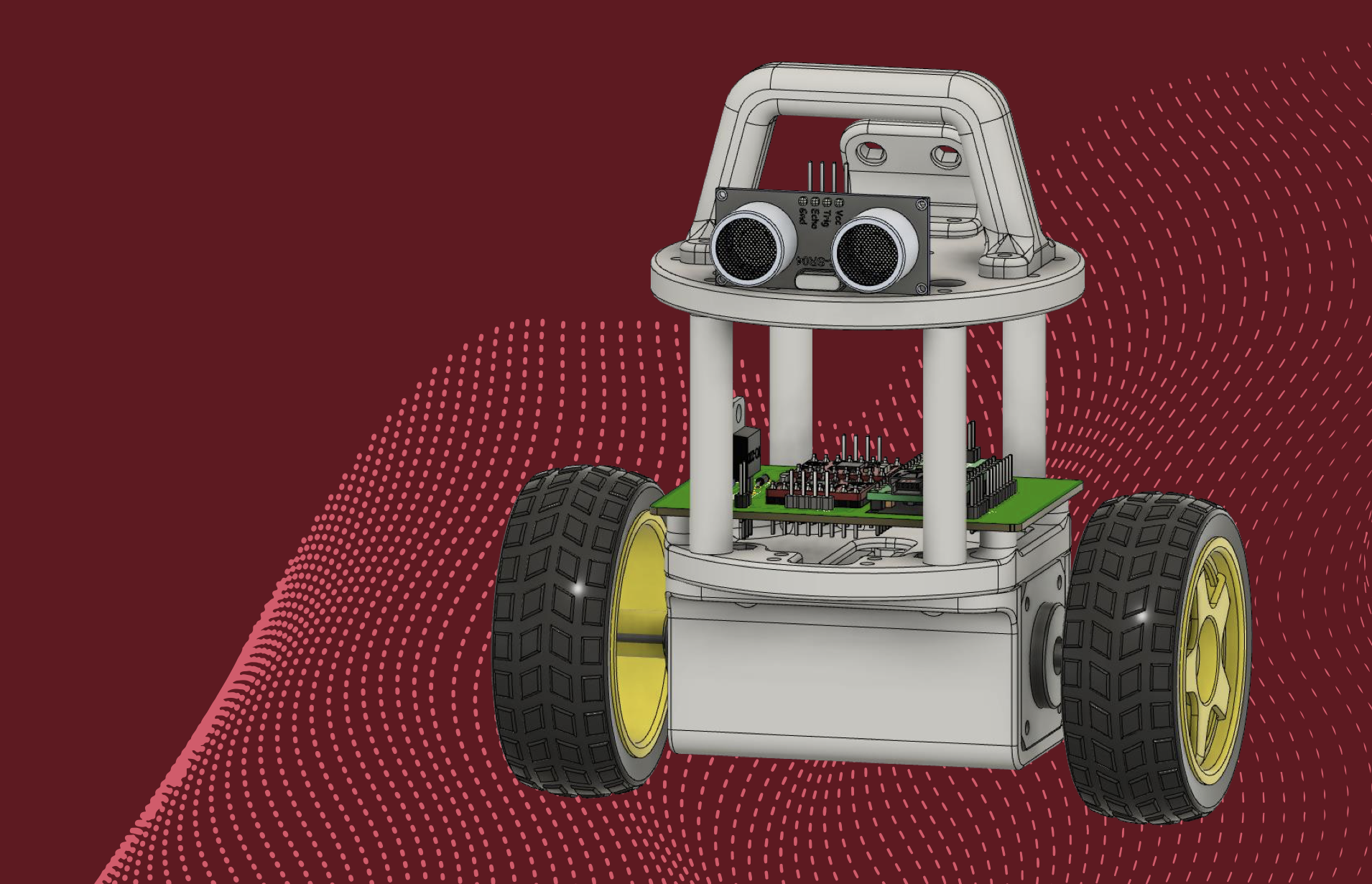
Self-balancing robot on two wheels
Digital Control System Arduino
University 'La Sapienza' of Rome
ACC on a self-balancing wheeled robot (GRANDLAND)