
Control of underactuated robots via input-constrained receding-horizon differential dynamic programming
Winter - Spring 2023/2024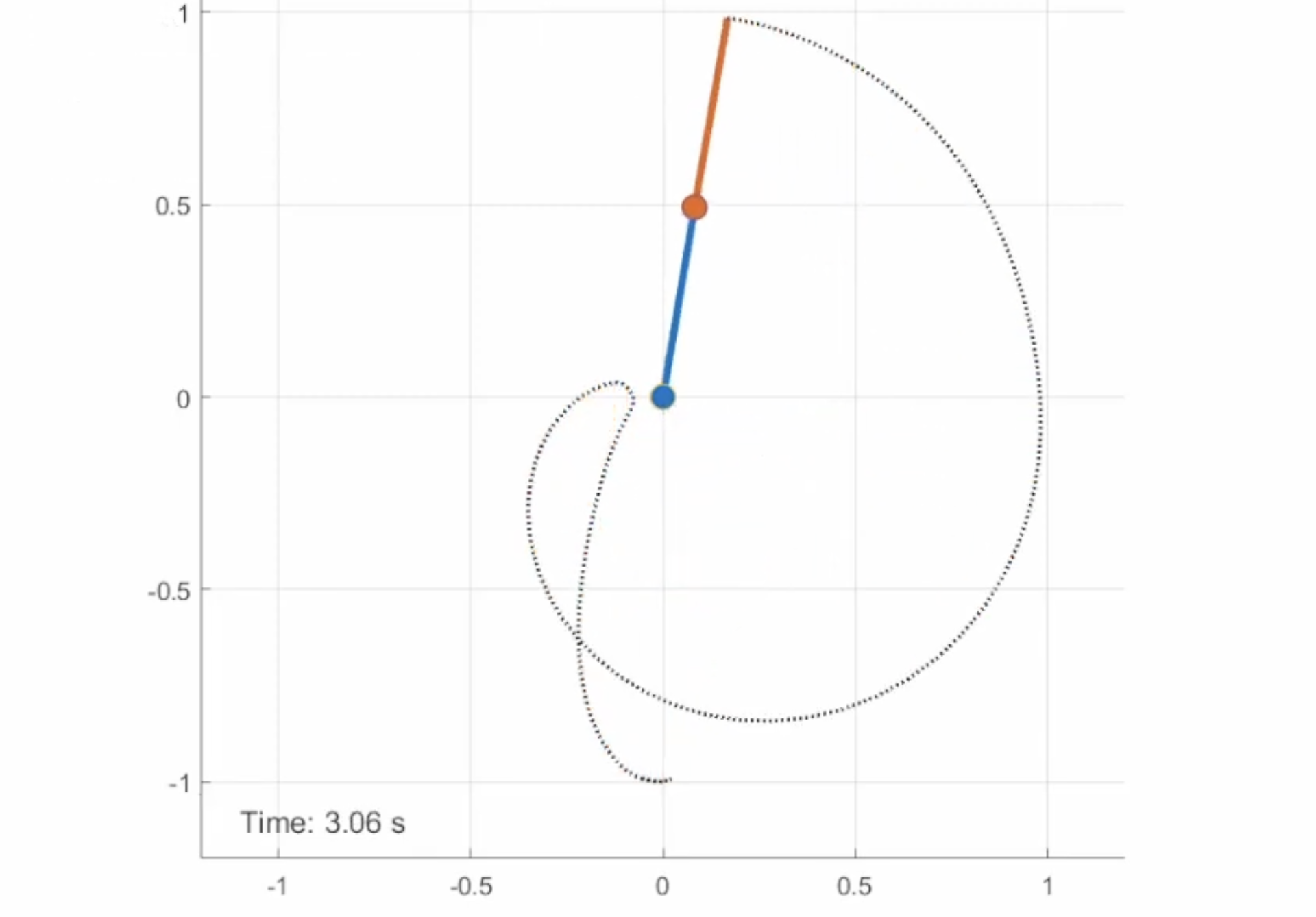
Venue: University 'La Sapienza' of Rome
We push Differential Dynamic Programming beyond textbook form to tame under-actuated robots—machines with more freedom than motors. By fusing DDP with Levenberg-Marquardt regularisation, line-search safeguarding, hard input constraints, and a receding-horizon (MPC-style) wrapper, we turn a notoriously sensitive optimiser into a robust, real-time controller. Step-by-step pseudocode and experiments on the pendubot and acrobot show the payoff: rapid convergence, constraint satisfaction, and graceful swings-to-upright that spotlight DDP’s power when precision meets smart regularisation.