
Self-balancing robot on two wheels
Autumn - Winter 2023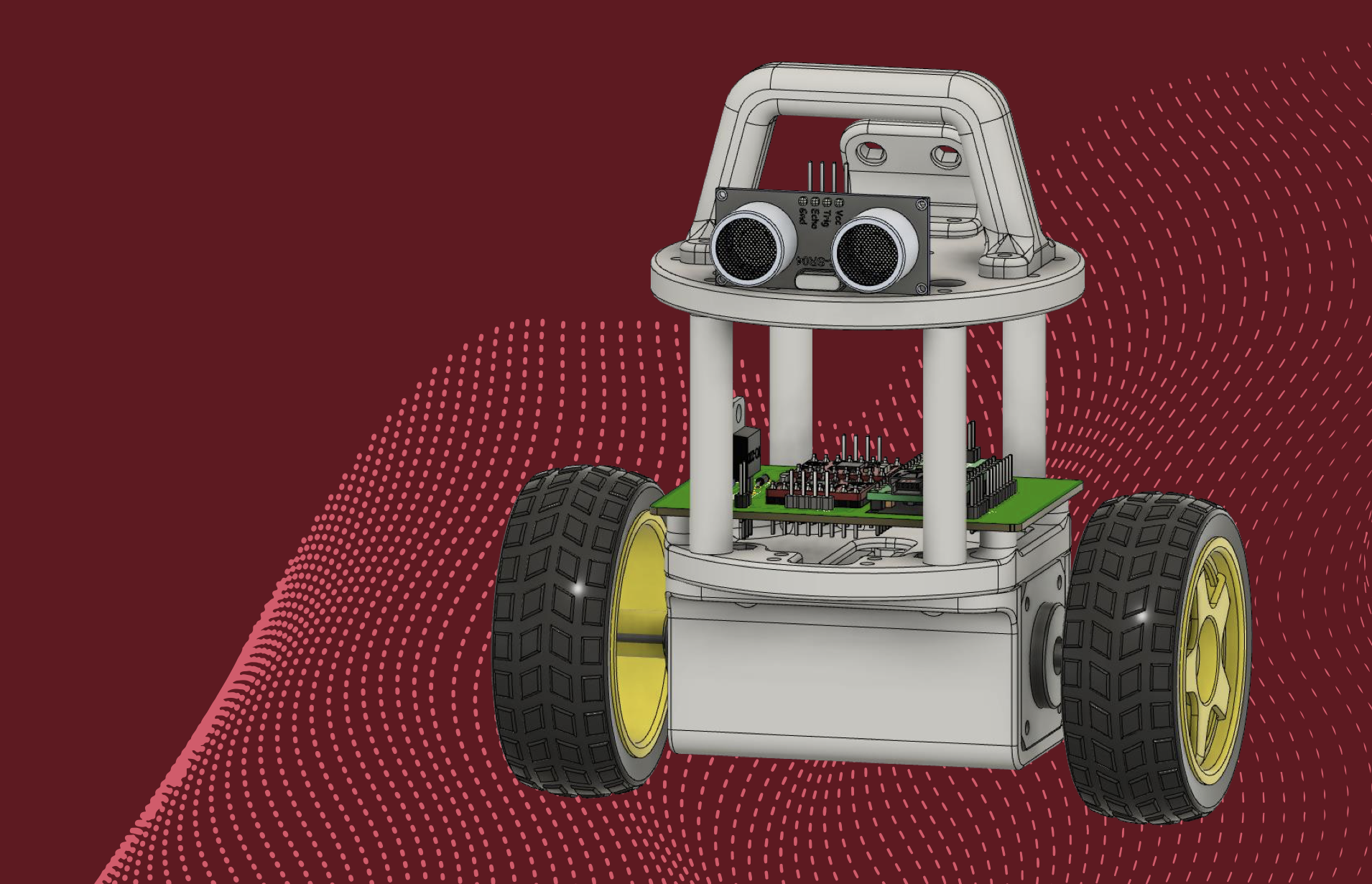
Venue: University 'La Sapienza' of Rome
ACC on a self-balancing wheeled robot (GRANDLAND)
Components:
- Arduino Pro Micro
- 2 pcs. NEMA 14 stepper motors
- 2 pcs. model car wheels
- 2 pcs. A4988 Stepper motor driver modules
- MPU-6050 gyro/accelerometer breakout board
- 3 cell LiPo battery
- 20 pcs. M3 16 mm